






















 |
4 poli BLDC Planetario senza spazzole Dc Gear Motor per mobili / medici / industria
Dettagli:
| Luogo di origine: | Dongguan Cina |
| Marca: | UCHI |
| Certificazione: | Completed |
| Numero di modello: | 42JXE100K/B4260 |
Termini di pagamento e spedizione:
| Quantità di ordine minimo: | 1000 pezzi |
|---|---|
| Prezzo: | Negoziabile |
| Imballaggi particolari: | Norme |
| Tempi di consegna: | 5-7 giorni |
| Termini di pagamento: | T/T, Western Union |
| Capacità di alimentazione: | 5000 pezzi di stoccolo |
|
Informazioni dettagliate |
|||
| Numero di polacchi: | 4 | Distanza di funzionamento: | 9V~16V |
|---|---|---|---|
| coppia g.cm: | 370 | Ampia gamma di applicazioni: | Arredamento/medico/industria |
| Certificato: | 3C | Velocità a vuoto r/min: | 6000 |
| Corrente a zero carico mA: | 680 | velocità nominale r/min: | 5000 |
| Potere stimato W: | 19,0 | Numero della fase: | 3 |
| Evidenziare: | Motore di trasmissione a corrente continua senza spazzole per mobili,Motore di ingranaggi a corrente continua senza spazzole per uso medico,Motore di ingranaggi planetari a corrente continua per l'industria |
||
Descrizione di prodotto
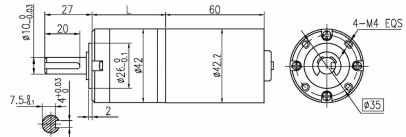
Distanza di carico ammissibile: 1N.m~10N.m.
![]()
Dati tecnici del motore senza spazzola
| TIPO | Numero di poli |
Numero di fase |
Funzionamento Distanza |
Classificato tensione VDC |
senza carico velocità r/min |
senza carico corrente mA |
Classificato coppia g.cm |
Classificato velocità r/min |
Classificato corrente A |
Classificato potenza W |
||||||||||||||||
| B4260-1260 | 4 | 3 | 9V~ 16V | 12 | 6000 | 680 | 370 | 5000 | 2.8 | 19.0 | ||||||||||||||||
| B4260-2460 | 4 | 3 | 9V~26V | 24 | 6000 | 350 | 370 | 5300 | 1.4 | 20.1 | ||||||||||||||||
Dati tecnici del motore senza spazzola
1.B4260-1260 Motore BLDC
| Rapporto di riduzione | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Numero di ingranaggi | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Lunghezza ((L) | mm | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Velocità senza carico | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Velocità nominale | r/min | 1348 | 965 | 357 | 263 | 185 | 98 | 70 | 50 | 36 | 28 | 23 | 20 | 16 | 14 | 12 | 10 | |||||||||
| Torsione nominale | N.m. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| carico massimo ammissibile in breve tempo | N.m. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
2. B4260-2460 Motore BLDC
| Rapporto di riduzione | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Numero di ingranaggi | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Lunghezza ((L) | mm | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Velocità senza carico | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Velocità nominale | r/min | 1429 | 1023 | 379 | 279 | 196 | 104 | 75 | 53 | 38 | 29 | 24 | 21 | 17 | 15 | 12 | 11 | |||||||||
| Torsione nominale | N.m. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| carico massimo ammissibile in breve tempo | N.m. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
Diagramma del filo
![]()
PIN 1# Feedback n=60 * F/P, dove F rappresenta la frequenza di uscita di feedback e P 4 coppie di coppie di pali motore.
PIN 2# Controllo dei freni
PIN 3 # regolazione della velocità PWM, ingresso del segnale PWM da 20 a 30 kHz e regolazione della velocità del motore regolando il ciclo di lavoro.
PIN 4# La rotazione in avanti e in indietro, la rotazione in sospensione è CW e il cortocircuito alla rotazione a terra è CCW.
PIN 5# Polo negativo dell'alimentazione
Il polo positivo (linea blu) del motore è collegato al polo positivo dell'alimentazione, e il polo negativo (linea verde) del motore è collegato al polo negativo dell'alimentazione.PIN3 # e PIN5 # sono collegati e il motore funziona a tutta velocità.
Secondo lo stesso requisito, durante la commutazione avanti e indietro, PIN3 #, PIN4 # e PIN5 # devono essere collegati insieme.
![]()
PIN 3 # regolazione della velocità PWM, ingresso del segnale PWM da 20 a 30 kHz e regolazione della velocità del motore regolando il ciclo di lavoro.
PIN 4#La rotazione avanti e indietro, la rotazione sospesa è CW e il cortocircuito alla rotazione a terra è CCW.
PIN 5#Polo negativo dell'alimentazione